 |
|
 04.11.2021, 19:57
04.11.2021, 19:57
|
#421 |
|
Местный

Регистрация: 07.02.2018
Адрес: Белая Русь
Сообщений: 150
|
Думаю достаточно будет выдавать сообщения в таком виде:
РСП. Курс 275, дальность 15, высота 600. На глиссаде. (самолет находится в конусе с параметрами +-3 градуса от линии глиссады); РСП. Курс 275, дальность 15, высота 600. Выше (ниже), левее (правее) глиссады.(самолет вышел из конуса с параметрами +-3 градуса от линии глиссады, но находится в ДН посадочной РЛС РСП). В этом случае пилоту необходимо плавными маневрами убирать расхождения. Если самолет вышел из ДН посадочной РЛС РСП, пилот начнет получать сообщения от ПНА и должен сообразить, что косячит сильно и принимать более решительные действия..... |

|

|
|
05.11.2021, 06:40
|
#422 | |
|
Чёрный бомбер

Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Цитата:
И еще один вопрос, не указан угол вертикальной глиссады. |
|
|
|
|
|
05.11.2021, 08:30
|
#423 |
|
Местный
Регистрация: 07.02.2018
Адрес: Белая Русь
Сообщений: 150
|
В букварях пишут 2.40 - 3.0.
Глиссадная антенна качается в пределах от -1 до +8 градусов. Думаю с отрицательными углами заморачиваться не стоит. Взять 0 и +10. Средняя линия +5 градусов пусть и будет линией глиссады. |
|
|
|
|
05.11.2021, 11:43
|
#424 | |
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Цитата:
|
|
|
|
|
|
08.11.2021, 20:51
|
#425 |
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Итак, результаты тестирования прототипа РСП.
Боты заходят на посадку по глиссаде в 1 градус относительно РСП расположенной в середине ВПП. Мы планировали глиссаду сделать в 5 градусов, и учитывая что конус команд "на глиссаде" равен +-3 градуса, минимальный угол получается в 2 градуса. Поэтому, чтобы игроки, садящие свои самолеты на автопилоте, не видели команду РПС "ниже глиссады", предлагаю глиссаду сделать в 4 градуса. Последний раз редактировалось ildar; 26.12.2021 в 15:37. |
|
|
|
|
08.11.2021, 22:30
|
#426 |
|
Местный
Регистрация: 07.02.2018
Адрес: Белая Русь
Сообщений: 150
|
Понял, пусть будет 4. Есть еще одна засада. РСП располагается около центра полосы и метров 150 в строну от центральной линии ВПП. Так, что на индикаторе линия глиссады в горизонтальной плоскости немного смещена в сторону. Это на процесс особо не влияет, т.к. самолет выходит за створ на дальности в 2 км. от центра ВПП, т.е. в районе ближнего привода.
|
|
|
|
|
08.11.2021, 23:00
|
#427 | |
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Цитата:
Но учитывая что конус +-3 градуса, то все в пределах нормы. |
|
|
|
|
|
10.11.2021, 21:22
|
#428 |
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Так, немного доработал код. Если в прототипе использовался мой код для мода AWACS, который учитывал отклонение по тангажу самолета ДРЛО, стоящего на ВПП, то сейчас угол глиссады учитывается от земли.
Таким образом боты заходят на посадку по глиссаде 2,7 градуса Последний раз редактировалось ildar; 26.12.2021 в 15:37. |
|
|
|
|
11.12.2021, 17:46
|
#429 |
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Решил таки поработать над системами РЭБ (Радио Электронной Борьбы)
Принцип прост: самолет РЭБ ставит активные помехи, которые ослепляют РЛС. Дальность обнаружения РЛС снижается до значения расстояния до постановщика помех. Все самолеты летящие дальше от самолета РЭБ становятся невидимыми для РЛС. Записал видео примера работы РЭБ: https://www.youtube.com/watch?v=buTxabwdcwo Постановщик помех А-20, летит позади цели Ил-4, летящего на высоте 5100 м. РЛС видит Ил-4 и передает его координаты. А-20 догоняет и перегоняет Ил-4, становясь ближе к РЛС. РЛС теряет Ил-4 и замолкает. Далее А-20 отворачивает и уходит в сторону. Ил-4 обгоняет А-20 и снова становится ближе к РЛС. РЛС снова обнаруживает Ил-4 и передает его координаты. Сам А-20 невидим для РЛС, так как он летит в помехах. |
|
|
|
|
12.12.2021, 15:46
|
#430 | |
|
Местный
Регистрация: 07.02.2018
Адрес: Белая Русь
Сообщений: 150
|
Цитата:
Для активных помех подходит такой вариант: дальность до постановщика помех 100 км - провала в ДН РЛС нет; дальность до постановщика помех 99 км - провал в ДН РЛС 1 градус; дальность до постановщика помех 98 км - провал в ДН РЛС 2 градуса; и далее по градусу на каждый километр. Соответственно, РЛС в провале на наблюдает постановщика помех и все самолеты, которые находятся в подавляемом секторе. |
|
|
|
|
|
13.12.2021, 07:48
|
#431 | |
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Цитата:
Из активных помех я выбрал не простые шумовые помехи, засвечивающие некоторые сектора на ИКО 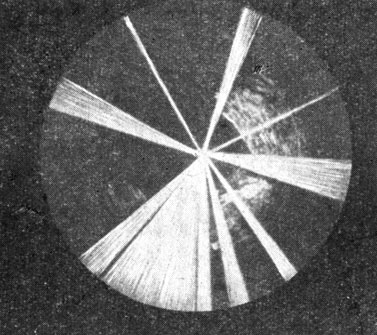 А с амплитудно-модулированными помехами, ставящими такие спиральные засветки 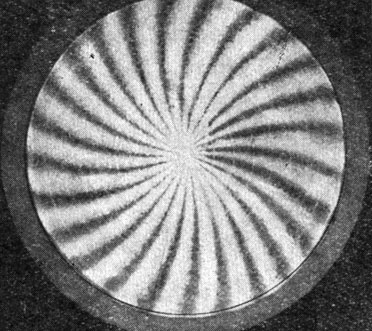 Более того, сейчас работаю над импульсными помехами, забивающими ИКО множеством ложных отметок целей  В этом случае РЛС будут выдавать координаты цели со случайными ошибками в диапазоне, например, от 1000 до 10000 м по дальности и высоте, а также по азимуту, наводя игрока на пустое место. |
|
|
|
|
|
13.12.2021, 07:49
|
#432 |
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Более того, сделаю так, чтобы разные виды помех можно было комбинировать вместе
|
|
|
|
|
13.12.2021, 20:05
|
#433 | |
|
Местный
Регистрация: 07.02.2018
Адрес: Белая Русь
Сообщений: 150
|
Цитата:
А на КП в это время организуют работу по выполнению боевой задачи в условия применения противником помех (на РЛС включается аппаратура защиты, проводится перестройка на запасные частоты, дополнительно включаются РЛС, работающие в других диапазонах, проводка целей осуществляется по данным соседних подразделений.... ) |
|
|
|
|
|
16.12.2021, 16:55
|
#434 | ||
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Цитата:
Так что пытаться наводить будут, благо наведения будет только для имитационных помех с ложными отметками, а вот при шумовых помехах оператор будет молчать. Цитата:
Я решил делать следующие помехи: 1. Пассивные (полоски фольги, она же система Windows, она же система Düppel) - радиус обзора РЛС будет равен расстоянию до постановщика помех (ПП). 2. Активные шумовые помехи (помехи закрывают собой отметку цели на индикаторе) - будет закрываться сектор обзора направления на постановщика помех, который будет увеличиваться по мере приближения ПП до РЛС 3. Активные имитационные помехи (индикатор РЛС забивается множеством ложных отметок целей) - оператор РЛС будет выдавать координаты цели со случайно выбираемыми ошибками по дальности, высоте и азимуту. 4. Подавление канала радиосвязи между оператором и пилотом перехватчика - на экране игрока будет показываться вместо команд наведения сообщения типа "Сильные помехи!" Думаю сделать еще, чтобы ПП ставили помехи не всем типам РЛС, а определенным типам, типа ранние версии Фрейи полностью теряют работоспособность, а например, поздняя версия Фрейи или РЛС с СДЦ будут не восприимчивы к пассивным помехам. |
||
|
|
|
|
16.12.2021, 22:28
|
#435 | ||||||
|
Местный
Регистрация: 07.02.2018
Адрес: Белая Русь
Сообщений: 150
|
Цитата:
1 мая 1960 года. Хрущеву докладывают, что с пол шестого в воздушном пространстве СССР болтается У-2. И, мало того, идет в район Семипалатинска, а там вся ядерная мощь (на тот момент) страны. В Москве готовится парад, прибыли иностранные гости, трудовые коллективы и прочие официальные лица. Гесек дает команду: сбить ЛЮБОЙ ЦЕНОЙ. Что такое У-2 как цель для ПВО? Идиальная для ЗРВ. Высотная, малоскоростная, БЕЗ ПОМЕХ. Любой командир дивизиона не потея справится. Стреляй, читая газету, и иди за орденом. Но было ЛЮБОЙ ЦЕНОЙ. И куча командиров полков , бригад и дивизий кинулись выполнять приказ Генсека, нарушив все руководящие документы.... послав в одну точку и ракеты и перехватчики.... И, заметь, все это было БЕЗ ПОМЕХ! МиГ-19 послали потому что нужно было что то посылать, а Су-9 от безисходности (он мог теоретически достать У-2), но был без оружия, т.к. перегонялся с завода к месту службы. Пилота Су-9 спасло то, что пока ему ставили задачу на аэродроме, все закончилось. Цитата:
Цитата:
Цитата:
Цитата:
2. ОК. 3. С этими помехами все сложнее. Обычно они применяются против средств ЗРВ (ЗА) для срыва захвата цели на автосоповождение и наведения ЗУР (целеуказания ЗА). 4. При подавлении канала "ПНА-самолет" пилот не услышит сообщения"Сильные помехи!". На этот случай предусмотрен специальный алгоритм смены каналов связи. Т.е. при подавлении действующего канала связи штурман и пилот одновременно меняют частоту по заранее определенному алгоритму. В результате чего имеют несколько секунд для работы на чистом канале. Цитата:
|
||||||
|
|
|
|
21.03.2022, 19:38
|
#436 |
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Решил сделать инвентаризацию своего мода и возник вопрос:
Сейчас ПНА в качестве цели выбирает ближайший к нему самолет противника и наводит на него игрока. Это приводит к ситуациям, когда самолеты противника близкие к игроку, но дальние к ПНА, спокойно летят дальше. Стоит ли поменять алгоритм ПНА, чтобы он в качестве цели выбирал самолеты противника, ближайшие к игроку? |
|
|
|
|
21.03.2022, 19:40
|
#437 | |
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Цитата:
Ок, принял. |
|
|
|
|
|
23.03.2022, 18:26
|
#438 | |
|
Местный
Регистрация: 07.02.2018
Адрес: Белая Русь
Сообщений: 150
|
Цитата:
|
|
|
|
|
|
24.03.2022, 13:16
|
#439 | |
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Цитата:
В руководстве к моду я распишу все аспекты его работы. Отдельно для мододелов напишу еще руководство как они смогут добавлять свои радары в мод 
|
|
|
|
|
|
27.05.2022, 15:02
|
#440 |
|
Чёрный бомбер
Регистрация: 26.11.2018
Адрес: Бишкек, Кыргызстан
Сообщений: 329
|
Итак, после долгого перерыва снова взялся за работу над модом.
Решил освежить память и пробежался по коду мода, исправил несколько обнаруженных недочетов, провел оптимизацию кода, что еще повысило производительность и повысилась точность работы мода, а также сам код стал более "чистым" для восприятия программистом. Итак, сейчас заканчиваю работу над следующим функционалом: 1. РСП - Радиолокационная система посадки 2. Самолеты ДРЛО 3. РЛС с неподвижными антеннами, типа немецкого Mammut и английского Chain Home Работу над системами РЭБ пока отложу. |
|
|
|
 |
| Здесь присутствуют: 1 (пользователей: 0 , гостей: 1) | |
|
|



 Линейный вид
Линейный вид

